 See More: GitHub
See More: GitHub
Abstract
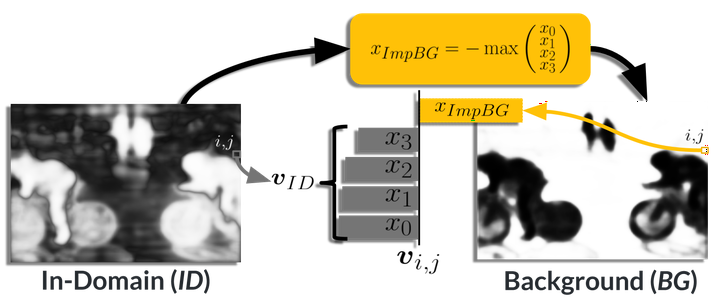
Scene understanding and semantic segmentation are at the core of many computer vision tasks, many of which, involve interacting with humans in potentially dangerous ways. It is therefore paramount that techniques for principled design of robust models be developed. In this paper, we provide analytic and empirical evidence that correcting potentially errant non-distinct mappings that result from the softmax function can result in improving robustness characteristics on a state-of-the-art semantic segmentation model with minimal impact to performance and minimal changes to the code base.
Type
Publication
In IEEE International Conference on Image Processing
Charlie Lehman
PhD Student
My research interests include robustness and explainability of deep vision models.